伺服的基本概念是准确、精确、快速定位。变频是伺服控制的一个必须的内部环节,伺服驱动器中同样存在变频(要进行无级调速)。
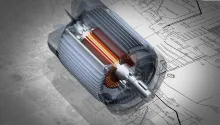
但伺服将电流环速度环或者位置环都闭合进行控制,这是很大的区别。除此外,伺服电机的构造与普通电机是有区别的,要满足快速响应和准确定位。
现在市面上流通的交流伺服电机多为永磁同步交流伺服,但这种电机受工艺限制,很难做到很大的功率,十几KW以上的同步伺服价格及其昂贵,这样在现场应用允许的情况下多采用交流异步伺服,这时很多驱动器就是高端变频器,带编码器反馈闭环控制。
所谓伺服就是要满足准确、精确、快速定位,只要满足就不存在伺服变频之争。
<strong>一、两者的共同点</strong>
交流伺服的技术本身就是借鉴并应用了变频的技术,在直流电机的伺服控制的基础上通过变频的PWM方式模仿直流电机的控制方式来实现的,也就是说交流伺服电机必然有变频的这一环节。
变频就是将工频的50、60HZ的交流电先整流成直流电,然后通过可控制门极的各类晶体管(IGBT,IGCT等)通过载波频率和PWM调节逆变为频率可调的波形类似于正余弦的脉动电,由于频率可调,所以交流电机的速度就可调了(n=60f/p ,n转速,f频率, p极对数)。
{kind=link}
{kind=link}